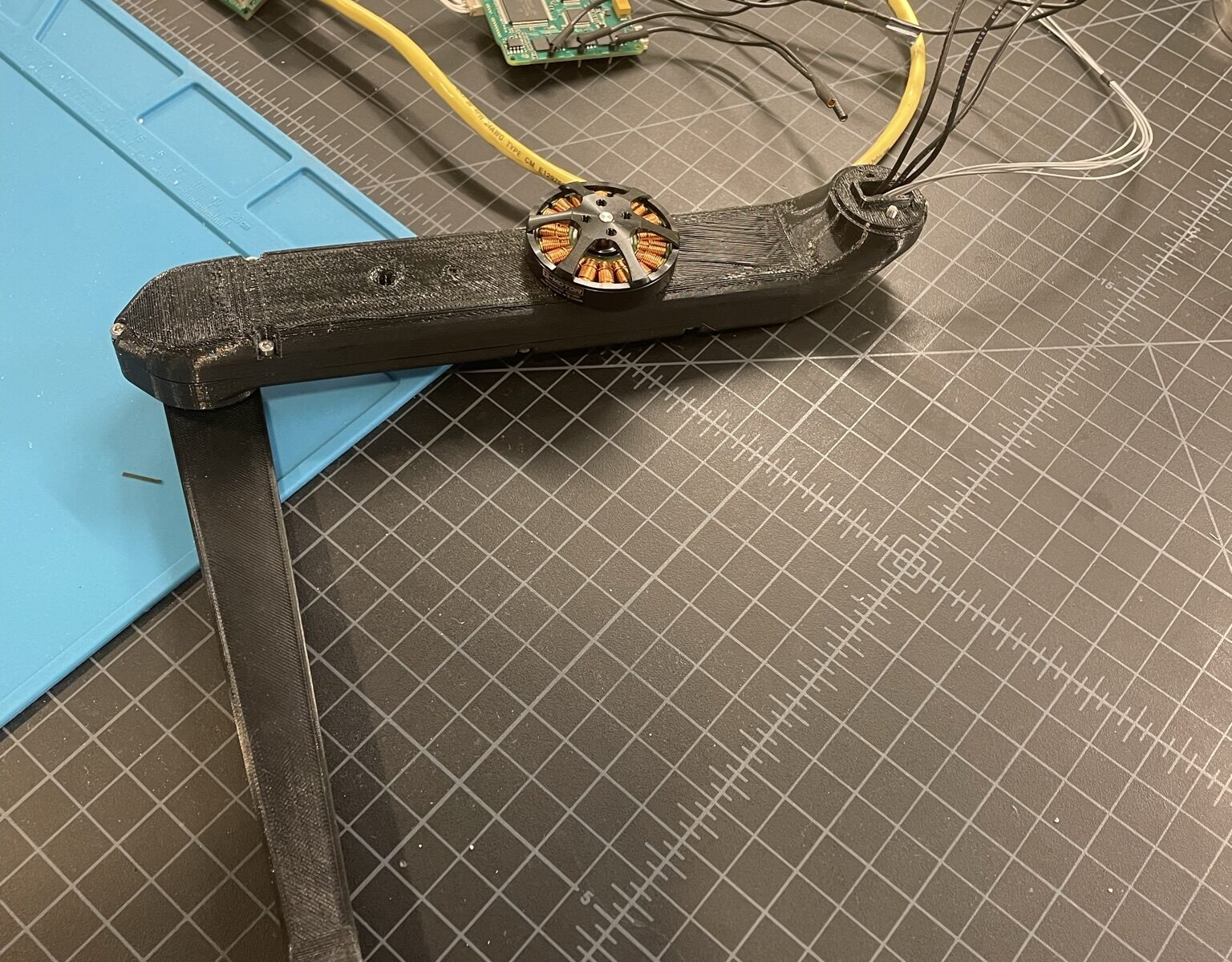
I am continuing my test of a single actuator, microdriver, masterboard setup. This post will focus on Flashing ODRI’s Microdriver V2. I ordered my Microdrivers V2 (uDriver) from SEEED , by uploading the following files in order: Production time totaled 26 days. Once received I prepared the uDrivers according to the Open Dynamic Robot Initiative …
Flashing ODRI’s Microdriver V2