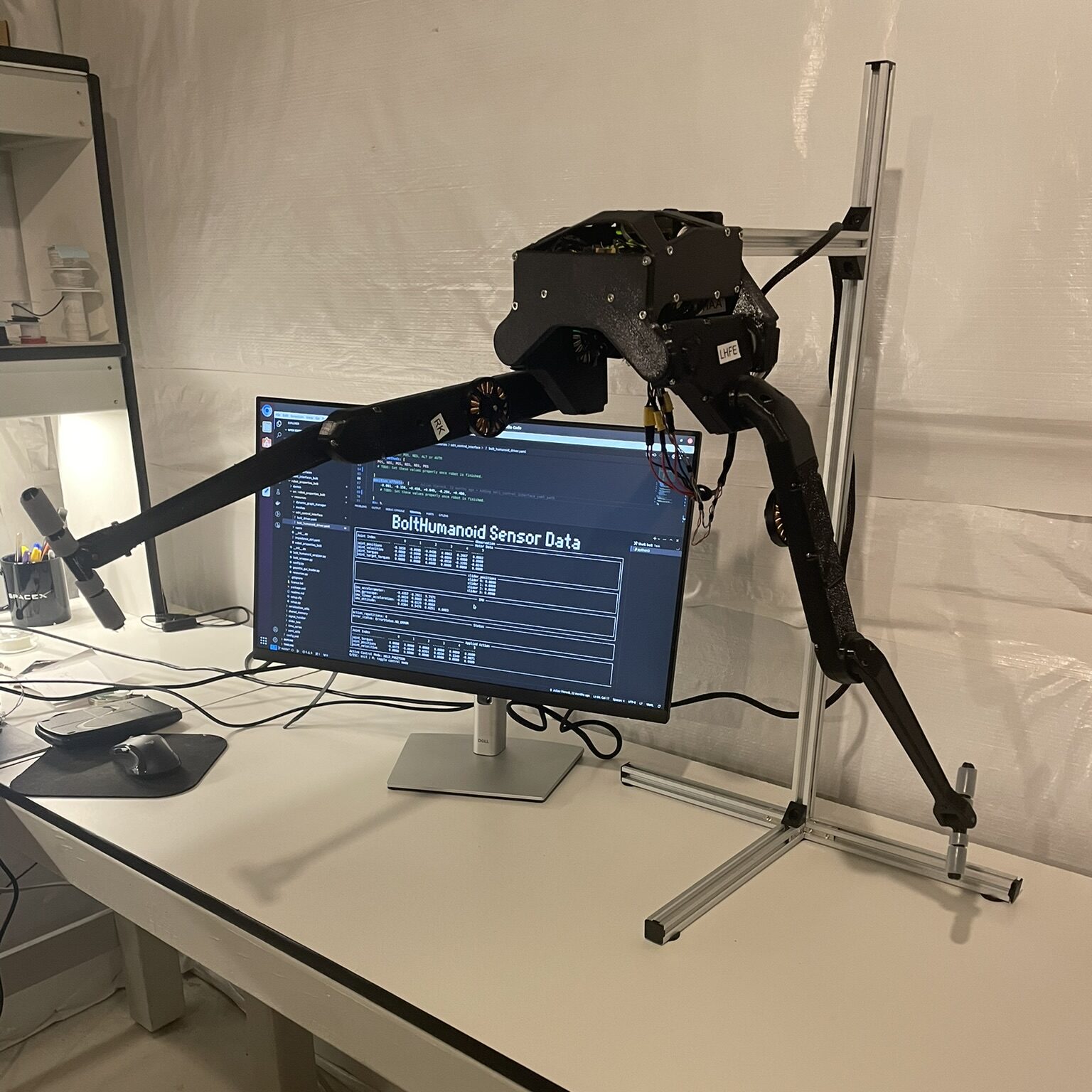
After a long time in the making (starting back in June of 2020) my build of the Open Dynamic Robot Initiative’s BOLT has been completed. Below was a power and sensor test utilizing the BoltHumanoid driver package. After re-crimping some of the encoder wiring which prevented indexing, everything worked quite well. Overall I have to say I really enjoyed the build.
My build forked the original design in a couple ways:
- Using an FDM printer to print the body in PETG
- Using an FDM printer to print the pulleys in PLA as a means of controlling costs
- Using a single color hookup wire to reduce wiring costs (more difficult to manage but saves a few hundred dollars)
- Finding a machine shop that could hit the machined part tolerances without special tooling
- Finding an off-brand Hirose crimp tool that was good enough to do the job
Every other component outside of the above is consistent with the original design, including the Lord IMU.
At a couple stages I struggled with in particular, chip shortage aside, that I plan to write about in future posts, namely:
- Machining the output pulleys, which required me to create a custom tool that I will post about
- Wiring the encoders with no Hirose crimp tool
- Sorting out the proper packages and OS, making sure the firmware matched software versions, etc.
- Getting started outside of building a test actuator
The project was, overall, was excellently documented. I noted the documentation growing over the last couple years. The discourse forum was particularly friendly and supportive.
Looking down the road I am considering potentially extending the original design, once I have thoroughly understood the software development kit, including:
- Adding a power management board, battery, and experimenting with Wifi
- experimenting with additional feet design
- Considering additional sensors, potentially visual
- Redesigning to include onboard compute
In immediate upcoming posts I plan on running some true walking examples which will be the ultimate test.