My first test flight, after assembling my 3D Robotics Quad C kit, ended 30ft up stuck in a tree. It was only afterwords I realized some of my inputs were swapped between my Spektrum AR8000 receiver and my Ardupilot, which switched my pitch and roll controls. Pushing the stick up rolled the quad left and right. Pushing the stick left and right pitched the quad forward and back. On top of which I had inverted the servo controls on my Spektrum transmitter.
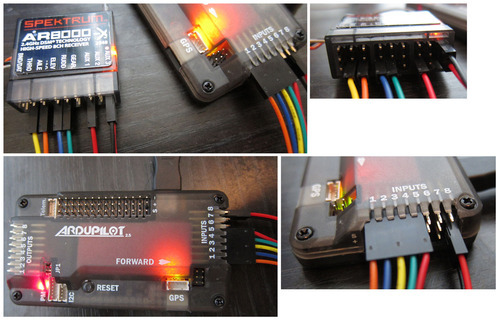
Courtesy of multi-rotors Tumblr post
If only I had found the above images from multi-rotors Tumblr post sooner.